1. 引言
ToF(Time of flight)是飛行時(shí)間法,它是一種深度測量的方法,精度為厘米級。因?yàn)槠湓砗唵危⌒突瑴y量距離范圍較大,抗干擾能力較強(qiáng),而得到廣泛的應(yīng)用,比如,微軟的Kinect 2.0,Iphone 12手機(jī)的ToF相機(jī),無人駕駛都應(yīng)用到了ToF技術(shù)。下面就對ToF的基本原理,優(yōu)缺點(diǎn),影響ToF精度的因素這幾方面展開描述。
2. 原理
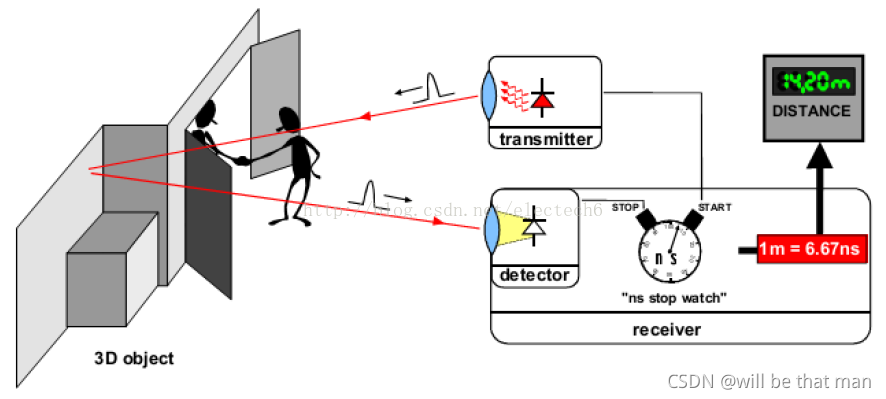
ToF的基本原理是通過連續(xù)發(fā)射光脈沖(一般為不可見光)到被測物體上,然后接收從物體反射回去的光脈沖,通過探測光脈沖的飛行(往返)時(shí)間來計(jì)算被測物體離相機(jī)的距離。下圖是飛行時(shí)間法深度測量基本原理示意圖。
ToF根據(jù)調(diào)制方法的不同,可以分為兩種:脈沖調(diào)制(Pulsed Modulation)和連續(xù)波調(diào)制(Continuous Wave Modulation)。由于脈沖調(diào)制是直接測量飛行時(shí)間,因此也稱為dToF(直接ToF)(Lidar,也叫激光雷達(dá),就是dToF),連續(xù)波調(diào)制是通過相位差來計(jì)算飛行時(shí)間,因此也稱為iToF。
2.1 脈沖調(diào)制(dToF)
脈沖調(diào)制直接根據(jù)脈沖發(fā)射和接收的時(shí)間差來測算距離。下圖是脈沖調(diào)制測距的示意圖:
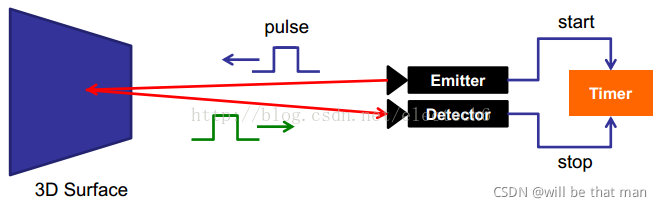
脈沖調(diào)制方案的照射光源一般采用方波脈沖調(diào)制,這是因?yàn)樗脭?shù)字電路來實(shí)現(xiàn)相對容易。接收端的每個(gè)像素都是由一個(gè)感光單元(如光電二極管)組成,它可以將入射光轉(zhuǎn)換為電流,感光單元連接著多個(gè)高頻轉(zhuǎn)換開關(guān)(下圖的G0,G1)可以把電流導(dǎo)入不同的可以儲存電荷(下圖S0,S1)的電容里。
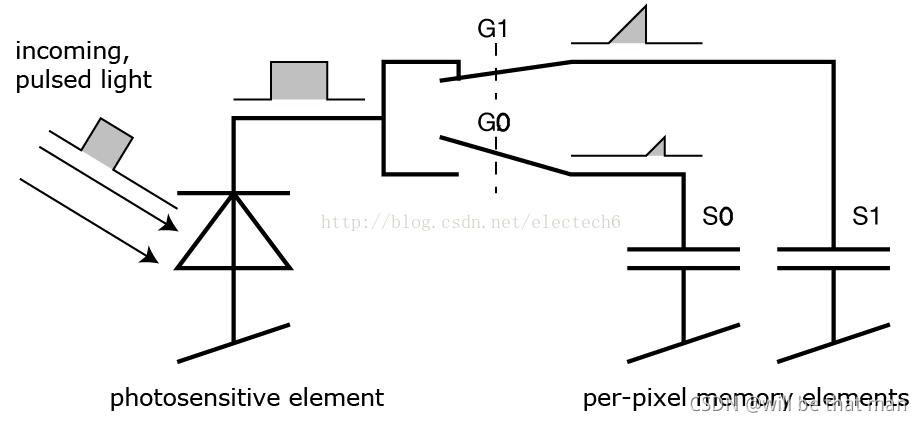
相機(jī)上的控制單元打開光源然后再關(guān)閉,發(fā)出一個(gè)光脈沖。在同一時(shí)刻,控制單元打開和關(guān)閉接收端的電子快門。接收端接收到的電荷S0被存儲在感光元件中。
然后,控制單元第二次打開并關(guān)閉光源。這次快門打開時(shí)間較晚,即在光源被關(guān)閉的時(shí)間點(diǎn)打開。新接收到的電荷S1也被存儲起來。具體過程如下圖所示。
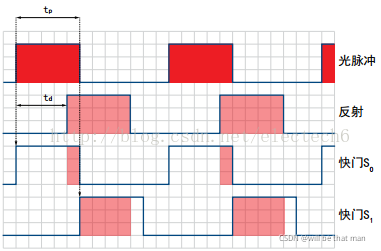
因?yàn)閱蝹€(gè)光脈沖的持續(xù)時(shí)間非常短,此過程會(huì)重復(fù)幾千次,直到達(dá)到曝光時(shí)間。然后感光傳感器中的值會(huì)被讀出,實(shí)際距離可以根據(jù)這些值來計(jì)算。
記光的速度為c,tp為光脈沖的持續(xù)時(shí)間, S0表示較早的快門收集的電荷, S1表示延遲的快門收集的電荷,那么距離d可以由如下公式計(jì)算:

最小的可測量距離是:在較早的快門期間S0中收集了所有的電荷,而在延遲的快門期間S1沒有收集到電荷,即S1 = 0。代入公式會(huì)得出最小可測量距離d=0。
最大的可測量的距離是:在S1中收集了所有電荷,而在S0中根本沒有收集到電荷。然后,該公式得出d= 0.5 x c × tp。因此最大可測量距離是通過光脈沖寬度來確定的。例如,tp = 50 ns,代入上式,得到最大測量距離d = 7.5m。
優(yōu)點(diǎn):
測量方法簡單,響應(yīng)較快
由于發(fā)射端能量較高,所以一定程度上降低了背景光的干擾
缺點(diǎn):
發(fā)射端需要產(chǎn)生高頻高強(qiáng)度脈沖,對物理器件性能要求很高
對時(shí)間測量精度要求較高
環(huán)境散射光對測量結(jié)果有一定影響
2.2 連續(xù)波調(diào)制(dToF)
實(shí)際應(yīng)用中,通常采用的是正弦波調(diào)制。由于接收端和發(fā)射端正弦波的相位偏移和物體距離攝像頭的距離成正比(見后面推導(dǎo)),因此可以利用相位偏移來測量距離。下圖是連續(xù)波調(diào)制原理示意圖:
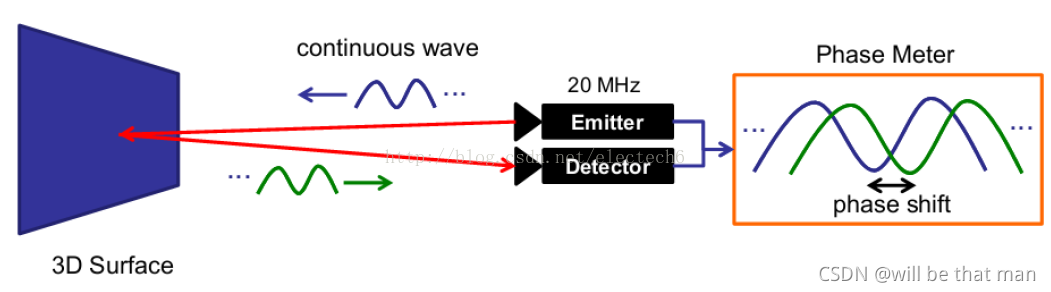
其實(shí)相移偏移來測量距離相位差的方法與四步相移法的推導(dǎo)基本一樣。下圖是發(fā)射的正弦波和接收的正弦波的示意圖:
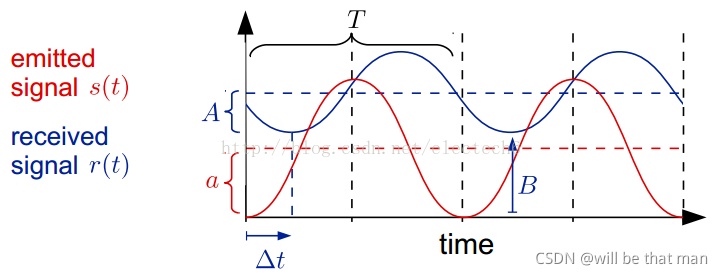
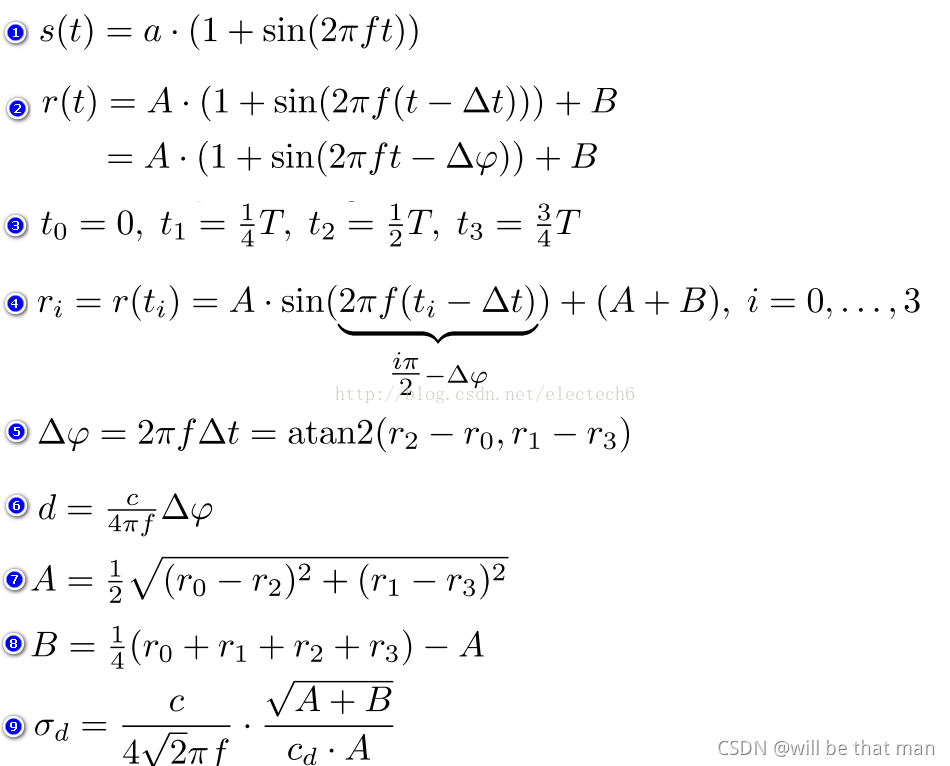
連續(xù)正弦波調(diào)制測量方法,具體的推導(dǎo)過程如下。序號1-9對應(yīng)下圖的公式1-9。
假設(shè)發(fā)射的正弦信號s(t)振幅是a,調(diào)制頻率是f
經(jīng)過時(shí)延 △t后接收到的信號為接收r(t),衰減后的振幅為A,強(qiáng)度偏移(由環(huán)境光引起)為B
四個(gè)采樣時(shí)間間隔相等,均為T/4
根據(jù)上述采樣時(shí)間可以列出四個(gè)方程組
從而可以計(jì)算出發(fā)射和接收的正弦信號的相位偏移△φ
據(jù)此可以根據(jù)(6)中公式計(jì)算物體和深度相機(jī)的距離d
接收信號的衰減后的振幅A的計(jì)算結(jié)果
接收信號強(qiáng)度偏移B的計(jì)算結(jié)果,反映了環(huán)境光
A, B的值間接的反應(yīng)了深度的測量精度,深度測量方差可以用公式9近似表示。
優(yōu)點(diǎn):
相位偏移(公式5)中的(r2-r0)和(r1-r3)相對于脈沖調(diào)試法消除了由于測量器件或者環(huán)境光引起的固定偏差。
可以根據(jù)接收信號的振幅A和強(qiáng)度偏移B來間接的估算深度測量結(jié)果的精確程度(方差)。
不要求光源必須是短時(shí)高強(qiáng)度脈沖,可以采用不同類型的光源,運(yùn)用不同的調(diào)制方法
缺點(diǎn):
需要多次采樣積分,測量時(shí)間較長,限制了相機(jī)的幀率
需要多次采樣積分,測量運(yùn)動(dòng)物體時(shí)可能會(huì)產(chǎn)生運(yùn)動(dòng)模糊。
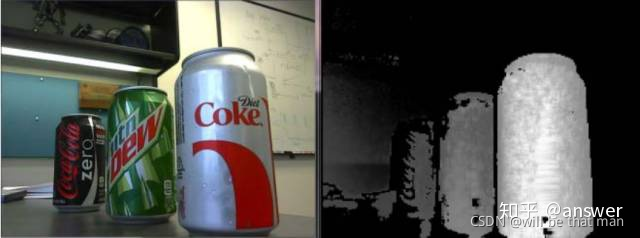
注意:ToF相機(jī)每次從發(fā)射端發(fā)出調(diào)制光,接收端其實(shí)是像相機(jī)一樣,有一個(gè)感光元件,上面有很多像素點(diǎn),每個(gè)像素點(diǎn)經(jīng)過上述過程都可以得到一個(gè)對應(yīng)的距離,所有的像素點(diǎn)測量的距離就構(gòu)成一幅深度圖,如下圖所示,左邊是原圖,右邊是對應(yīng)的深度圖。
3. 影響ToF的因素
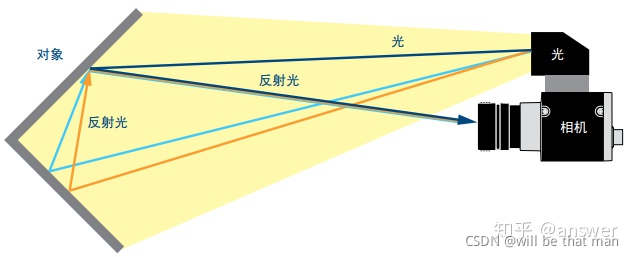
多重反射
距離測量要求光只反射一次。但是鏡面或者一些角落會(huì)導(dǎo)致光線的多次反射,這會(huì)導(dǎo)致測量失真。如果多重反射使得光線完全偏轉(zhuǎn),則沒有反射光線進(jìn)入相機(jī),從而無法正確測量反射面的距離。反之,如果其他方向的光通過鏡面反射進(jìn)入芯片,則可能會(huì)發(fā)生過度曝光。見下圖。
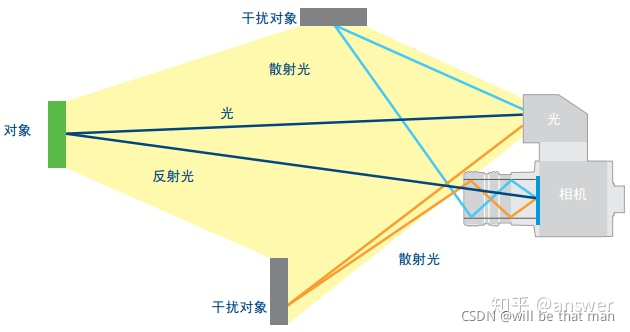
散射光
在鏡頭內(nèi)或在鏡頭后面發(fā)生多余反射會(huì)出現(xiàn)散射光,如下圖所示,散射光會(huì)導(dǎo)致圖像褪色,對比度下降等不良影響。所以要避免在相機(jī)正前方有強(qiáng)烈反光的物體存在。
環(huán)境光
深度相機(jī)鏡頭上會(huì)有一個(gè)帶通濾光片來保證只有與照明光源波長相同的光才能進(jìn)入,這樣可以抑制非相干光源提高信噪比。這種方式確實(shí)能夠比較有效地過濾掉人造光源,但是,我們常見的日光幾乎能夠覆蓋整個(gè)光譜范圍,這其中包括和照明光源一樣的波長,在某些情況下(如夏天的烈日)這部分光強(qiáng)可以達(dá)到很大,會(huì)導(dǎo)致感光傳感器出現(xiàn)過度曝光。因此相機(jī)如果想在這種條件下正常工作,仍然需要額外的保護(hù)機(jī)制。
溫度
電子元件的精度受溫度的影響,溫度波動(dòng)時(shí)會(huì)導(dǎo)致脈沖調(diào)制的精度。所以要做好散熱,才能保證測量精度。




 中文
中文 English
English
